兼松フューチャーテックソリューションズ株式会社は、株式会社Thinkerのロボットハンド用近接覚センサーTK-01と「カメラ無しでのばら積みピッキング」を可能にするロボットハンドThink Hand Fの販売を開始しました。
株式会社Thinkerについて
大阪大学大学院基礎工学研究科の小山佳祐助教(同社取締役)が開発した「近接覚センサー」の販売および、同製品を活用したソリューション提案を行っています。その場、その場に応じて、自分で判断する“思考力”をロボットに持たせることで、ヒトと一緒に働く協働ロボットの世界に革新を起こします。
Thinkerの近接覚センサーについて
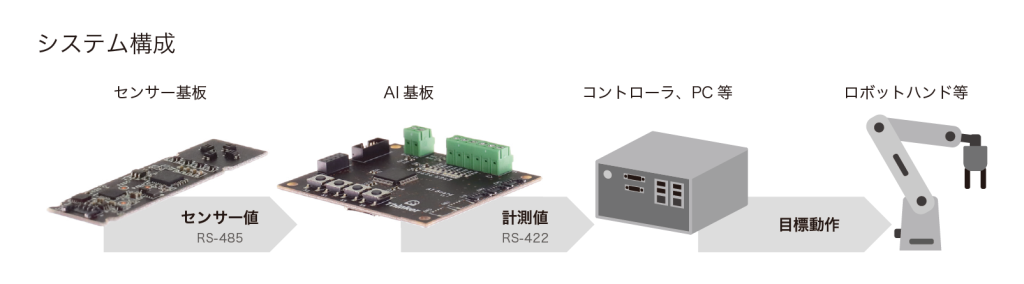
赤外線とAIを組み合わせた独自の高速・高分解能なセンシングにより死角部分を含めたモノの位置と形を非接触で把握できるセンサーです。
近接覚センサーTK-01

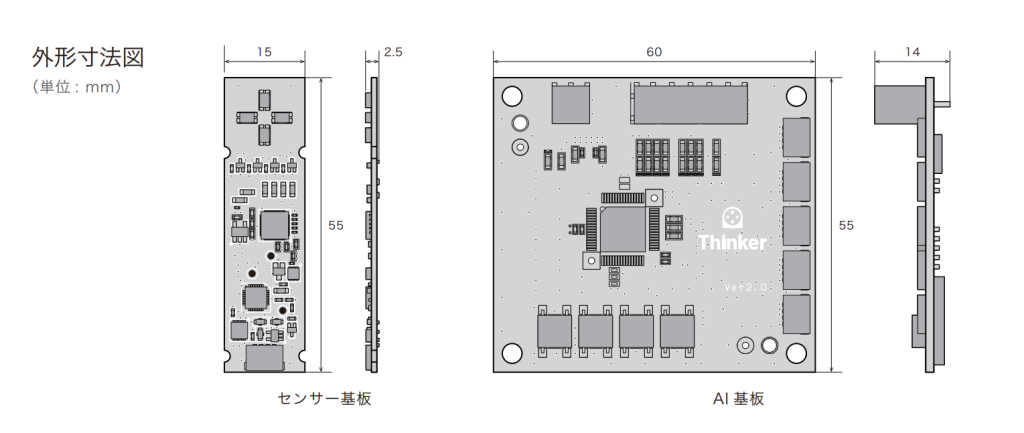
「つかむ」を進化させる!対象物の位置と姿勢を非接触のまま把握
『近接覚センサーTK-01』は、カメラシステムや一般的な光学式センサーが苦手としていた対象物のピッキングを可能にするロボットハンド用センサーです。
従来の産業用ロボットでは難しいとされていた鏡面・透明物質の取り扱いや、野菜のように形状が不揃いな物や柔らかな物も適切に把持できることから、これまで活用されなかった領域や用途でのロボット導入の可能性が広がります。
また、当製品を搭載したロボットハンドは、計測結果に基づいて指先位置を微調整できるため、ラフなティーチングでの運用が可能となります。
特徴
・独自の赤外線機構に軽量AIモデルを搭載
・これまで活用されなかった領域や用途でのロボット導入が可能
・対象物との距離と把持面の傾きを高精度で計測可能
・ティーチングが楽になり生産性UP
Think Hand F

新技術「近接覚センサーとフローティング機構」がフィンガーの動きを確認・制御し、バラ積みピッキングをカメラ無しで実現します。
フィンガーの開きやフィンガーの形状を変更することでさまざまな対象物の「カメラ無しでのばら積みピッキング」に対応できるロボットハンドです。
独自の「近接覚センサーとフローティング機構」の組み合わせで、ばら積みされたワークの中にフィンガーを差し込み、いわゆるまさぐり動作でワークを挟みます。掴み損ねた場合も、それをすぐ感知し再トライを行えます。
また、フィンガーが何かに衝突した場合も、フローティング機構で柔らかな接触を実現していますので、すぐに動作を停止させロボットの破損防止にもつなげられます。
柔らかい物をソフトに把持する、小さな物・細いものをきっちりと把持するといった事にも対応ができます。
特徴
・カメラレスでのピッキングを実現
・柔軟関節内蔵で自動衝突回避
・把持失敗などを瞬時に検知し、すばやいリトライで効率UP
詳細は、以下お問い合わせ先にご連絡ください。
本件に関する
お問い合わせはこちら
お問い合わせ
